Hi
Für einen LEGO internen Wettbewerb hab ich ein funktionierendes U-Boot gebaut ... naja, eigentlich hab ich zwei gebaut, das zweite ein wenig gepimpt, sonst aber halbwegs baugleich.
Darf ich vorstellen, "
Grey November Mark II" und "
Grey November Mark I"
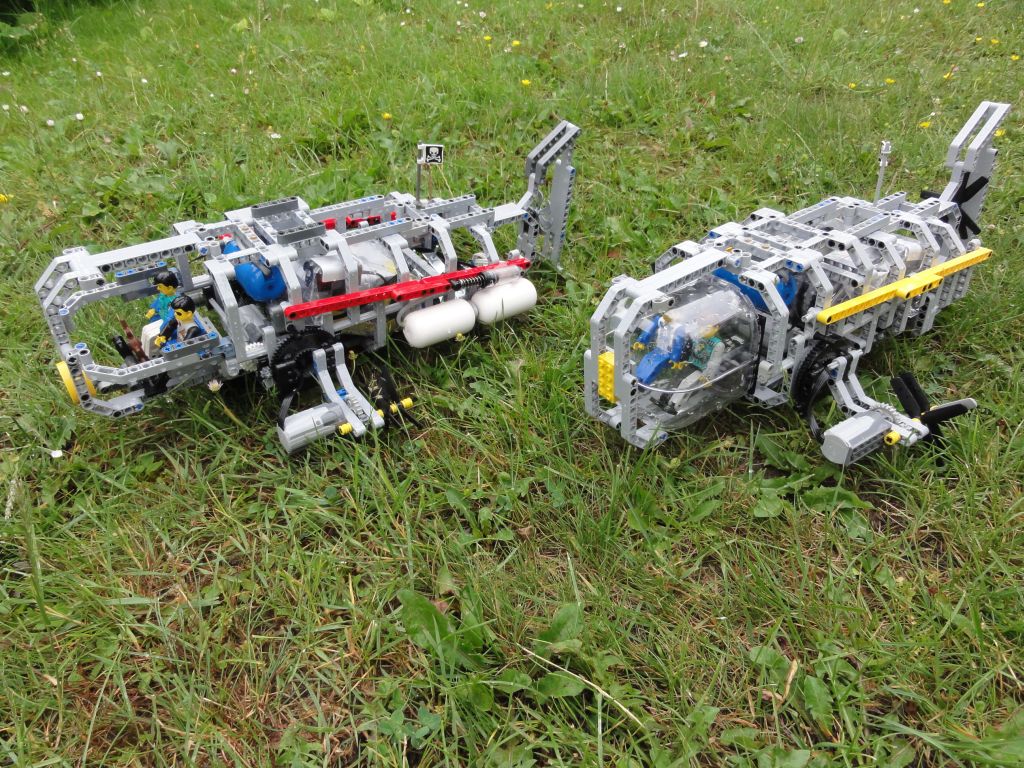
Die Aufgabe war, ein funktionierendes U-Boot zu bauen, das autark (mit Mindstorms, nicht ferngesteuert) tauchen und wieder auftauchen kann.
Also hab ich meinen NXT samt Sensoren in ein Plastiksackerl eingeschweißt, nur die drei Kabel für die Motore (2xVortrieb, 1xAuf/Abtrieb) und ein Kabel zum Laden des Akkus kommen aus dem Sackerl raus.
Den Saum des Sackerls habe ich mit zweifachem doppelseitigem Klebebband und viel Uhu abgedichtet, anschließend dann noch mit zwei Metallstreifen zusammengeschraubt, damit es extra dicht ist.
Bei meinen Tests habe ich bemerkt, daß Bluetooth, mit dem ich probehalber die Motore steuern wollte, schon nach wenigen Zentimetern Wassersäule verschluckt wird ... also nix mit mal so testen!
Na gut, hier seht ihr das Ergebnis auf Youtube ...
https://www.youtube.com/watch?v=JFLuhygda48Jedes U-Boot hat einen Kompasssensor an Bord, und es soll auch noch eine Verfolgungsfahrt möglich werden ... wenn meine beiden Subs wieder da sind, die sind gerade in Portugal auf einer LEGO-Austellung ...
lg
Greybeard, Käptn



 Autor
Thema: funktionierendes LEGO Mindstorms U-Boot "Grauer November" (Gelesen 5118 mal)
Autor
Thema: funktionierendes LEGO Mindstorms U-Boot "Grauer November" (Gelesen 5118 mal)